 CNR-ISMAR
CNR-ISMAR
5000
Type of resources
Available actions
Topics
INSPIRE themes
Provided by
Years
Formats
Representation types
Update frequencies
status
Scale
Resolution
-
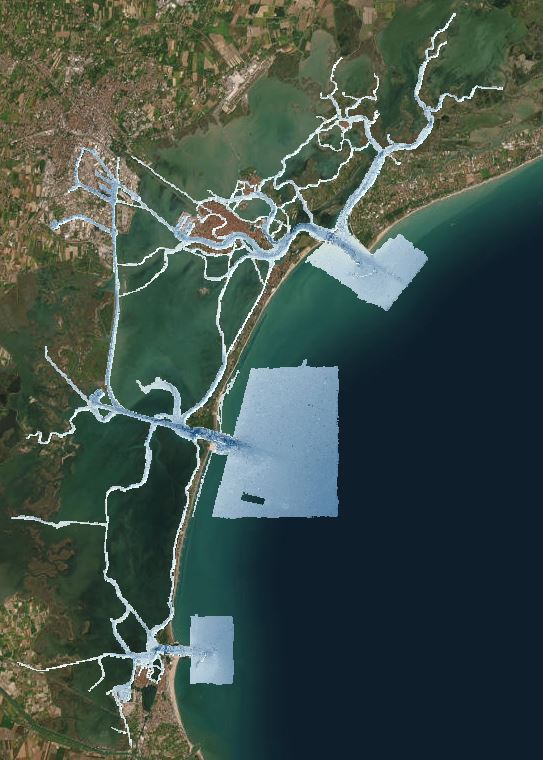
This dataset contains high-resolution ASCII:ESRI gridded bathymetric data (0.5 m DTM). Data was collected during a six-months survey (lasting from May to December 2013) in the channel network of the Venice Lagoon by means of the MBES system Kongsberg EM-2040 Compact dual head. The MBES was mounted on a pole at the bow of the CNR research vessel Litus, a 10-m long boat with only 1.5-m draft. The MBES has 800 beams (400 per swath) 1°x1°; the operational frequency for this survey was set at 360 kHz. A Seapath 300 system was used for ship positioning, improving its accuracy by the correction provided by a Fugro HP differential Global Positioning System (DGPS, accurate up to 0.2 m). Tidal correction of bathymetric data was based on a set of virtual tidal stations (93 points) distributed evenly around all the study area. The tidal corrections in each virtual tide gauge station were calculated using the water level simulated by the hydrodynamic model SHYFEM (Umgiesser et al., 2014) applied to the whole Venice Lagoon. Data was processed after collected using CARIS to account for sound velocity profiles, tide corrections, and manual quality control tools. The base surfaces were created with the Swath Angles Weighting option with a Max Footprint size of 9x9 pixels and a resolution of 0.5 m and cleaned using the subset editor to efficiently handle and visualize. The raw data are stored in the CNR-ISMAR Venice server and available under request to data owner. Data collection have been founded thanks to the Italian Italian Flagship Project RITMARE. The datafile iim_malamocco.asc was collected by the Italian hydrographic Institute (IIM Istituto Idrografico della Marina) by means of the MBES system Kongsberg EM3002 on board of the vessels MBN1148 and MBF1213. The Italian Hydrographic Institute processed the bathymetric using CARIS HIPS AND SIPS 7.1.
-
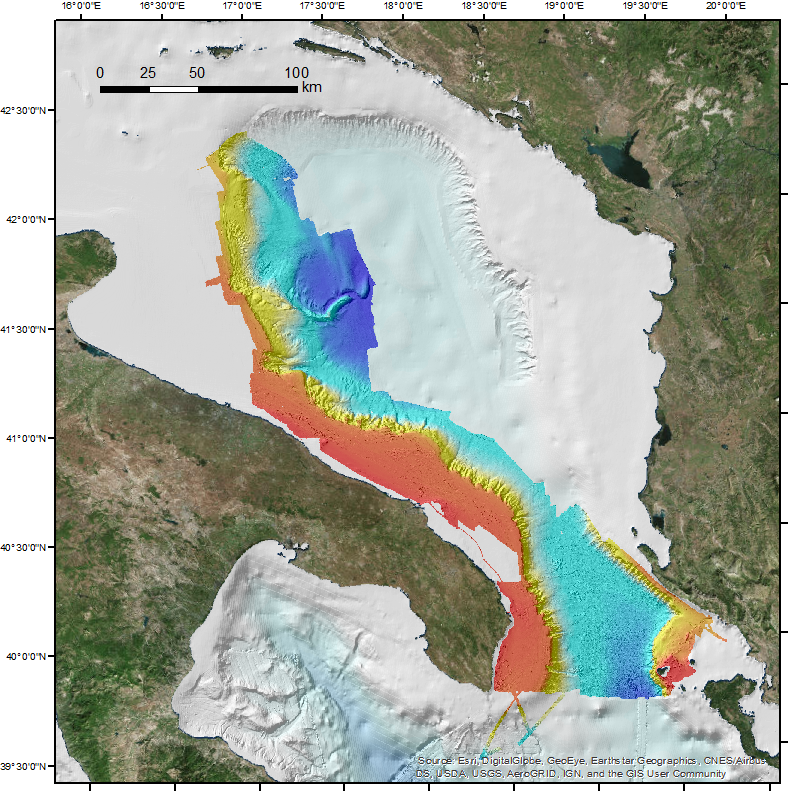
This DTM is the result of merging of several multibeam surveys identified by their CDIs names and short dataset names: 145_CNR-ISMAR-06, STRATA05;145_CNR-ISMAR-07,SETE06;145_CNR-ISMAR-08,BARCA07;145_CNR-ISMAR-09,SASSI08;145_CNR-ISMAR-10,IMPACT09;145_ CNR-ISMAR-11,MAGIC0409;145_CNR-ISMAR-12,ARCADIA;145_CNR-ISMAR-13,ARCO;145_145_CNR-ISMAR-44,RISA09;145_145_CNR-ISMAR-45, SOM09;145_145_CNR-ISMAR-46,MAGIC0709-ADRIA;145_145_CNR-ISMAR-47,MAGIC0910;145_145_CNR-ISMAR-48,MAGIC0211;145_145_ CNR-ISMAR-49,OBAMA;145_145_CNR-ISMAR-52,MEMA12;145_145_CNR-ISMAR-62,COCOMAP13;145_145_CNR-ISMAR-74,COCOMAP14.
-
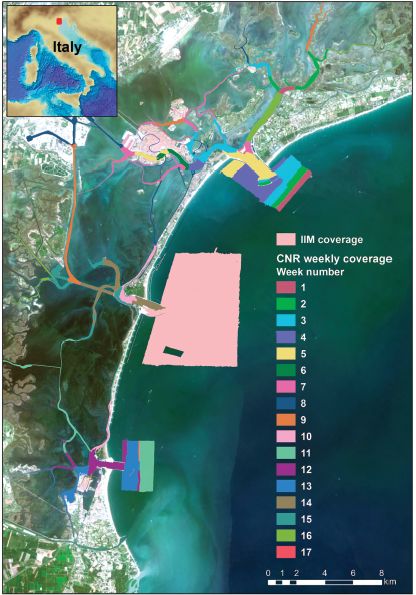
The multibeam data were collected during six-months in 2013 with a Kongsberg EM2040 compact dual-head multi-frequency system. Metadata for the 17-week-long survey is available from the Seadatanet catalogue CDIs: 145_CNR-ISMAR-102,145_CNR-ISMAR-103,145_CNR-ISMAR-104,145_CNR-ISMAR-105,145_CNR-ISMAR-106,145_CNR-ISMAR-107,145_CNR-ISMAR-108,145_CNR-ISMAR-109,145_CNR-ISMAR-110,145_CNR-ISMAR-111,145_CNR-ISMAR-112,145_CNR-ISMAR-113,145_CNR-ISMAR-114,145_CNR-ISMAR-115,145_CNR-ISMAR-116,145_CNR-ISMAR-117,145_CNR-ISMAR-118.
-
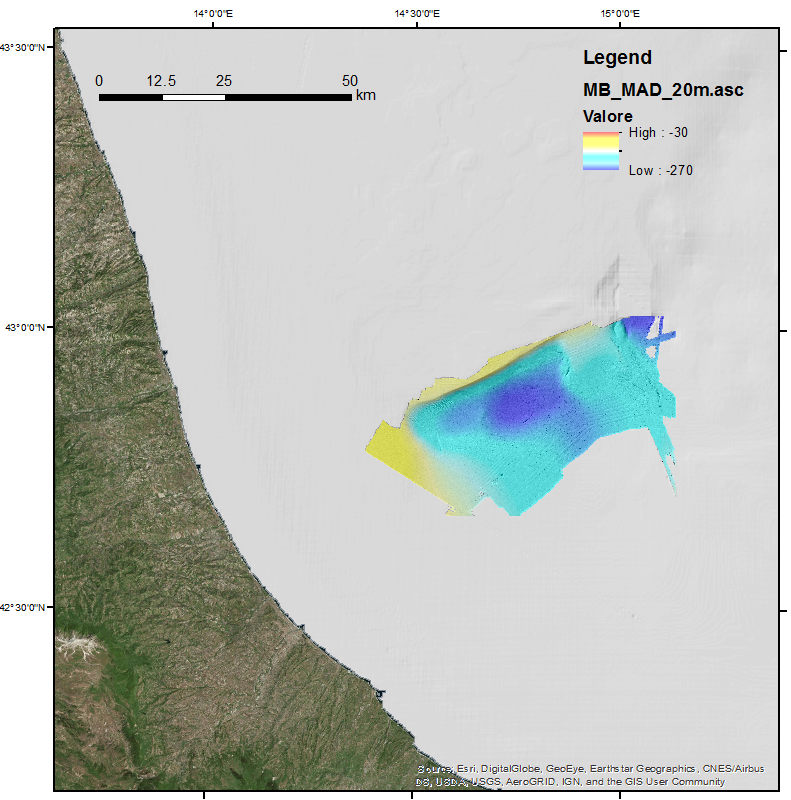
This DTM is the result of merging of two multibeam surveys identified by their CDIs names and short dataset names: 145_145_CNR-ISMAR-50,MADGAS 145_145_CNR-ISMAR-65,MADMAP12. These data were acquired with a Kongsberg EM710 multibeam system.