 CNR-ISMAR
CNR-ISMAR
2022
Type of resources
Available actions
Topics
INSPIRE themes
Provided by
Years
Formats
Representation types
Update frequencies
status
Scale
Resolution
-
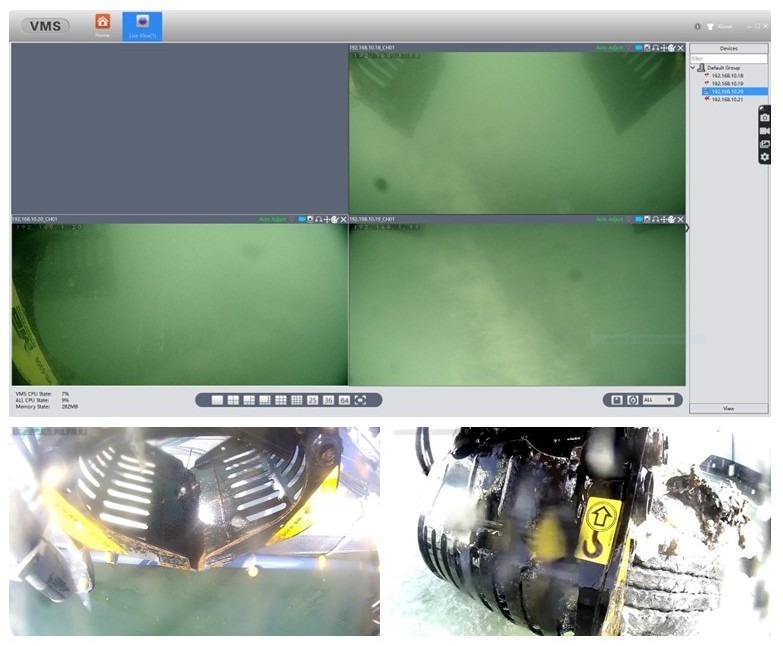
The robotic seabed cleaning platform developed by TECNALIA, CNRS- LIRMM and “Servizi Tecnici”, consists in a floating platform which, through cables and winches, the seabed cleaning robot is attached. The structure is equipped with a set of sensors for underwater perception to control the robot and detect & identify the marine litter to be removed. Moreover, the robotic platform is characterized by two different tools that allow to collect the ML on the seabed: a drudge to suck up smaller litter and a gripper to grasps larger items like tires, parts of boats, fishing nets etc.
-
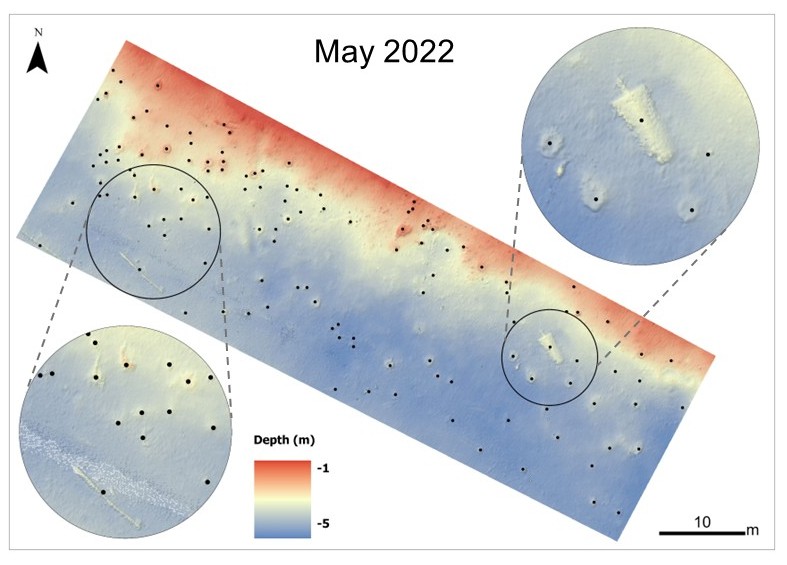
For this project, two study areas were selected and both are characterized by the presence of marine litter that has accumulated over time: a lagoon area (Sacca Fisola) and a coastal area, the latter located on an abandoned mussel farm.The lagoon site of Sacca Fisola is situated in an area where waste accumulates in substantial quantities. Consequently, the channel's seabed is marked by a significant presence of waste. Some of these waste items are buried beneath layers of sediment, while many others remain visible on the surface and can be identified using the bathymetric map generated from MultiBeam EchoSounder (MBES) data.
-
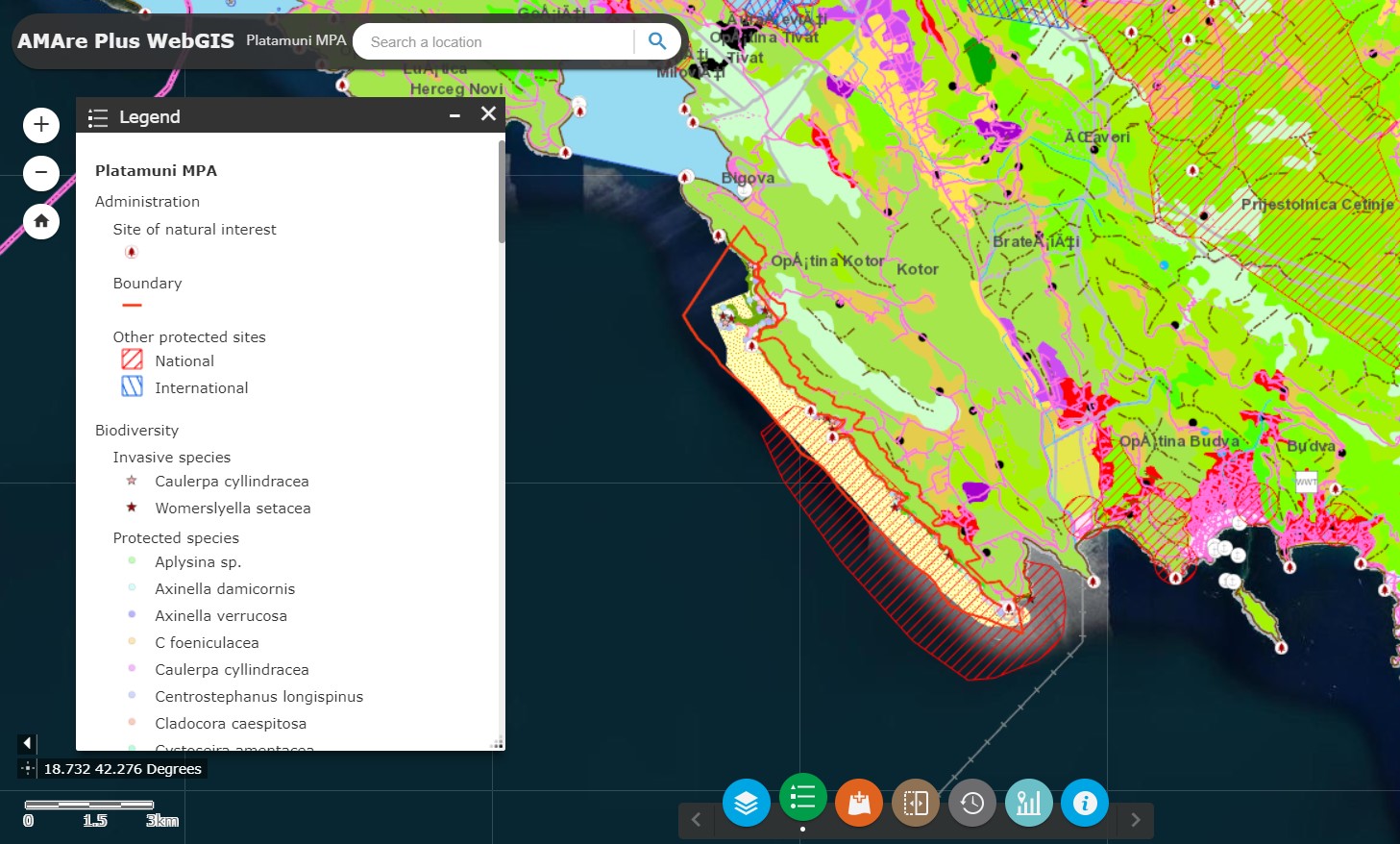
Web Map Service (WMS) providing spatial layers about the Marine Protected Area of Platamuni MPA implemented in the framework of the AMAre Project.
-
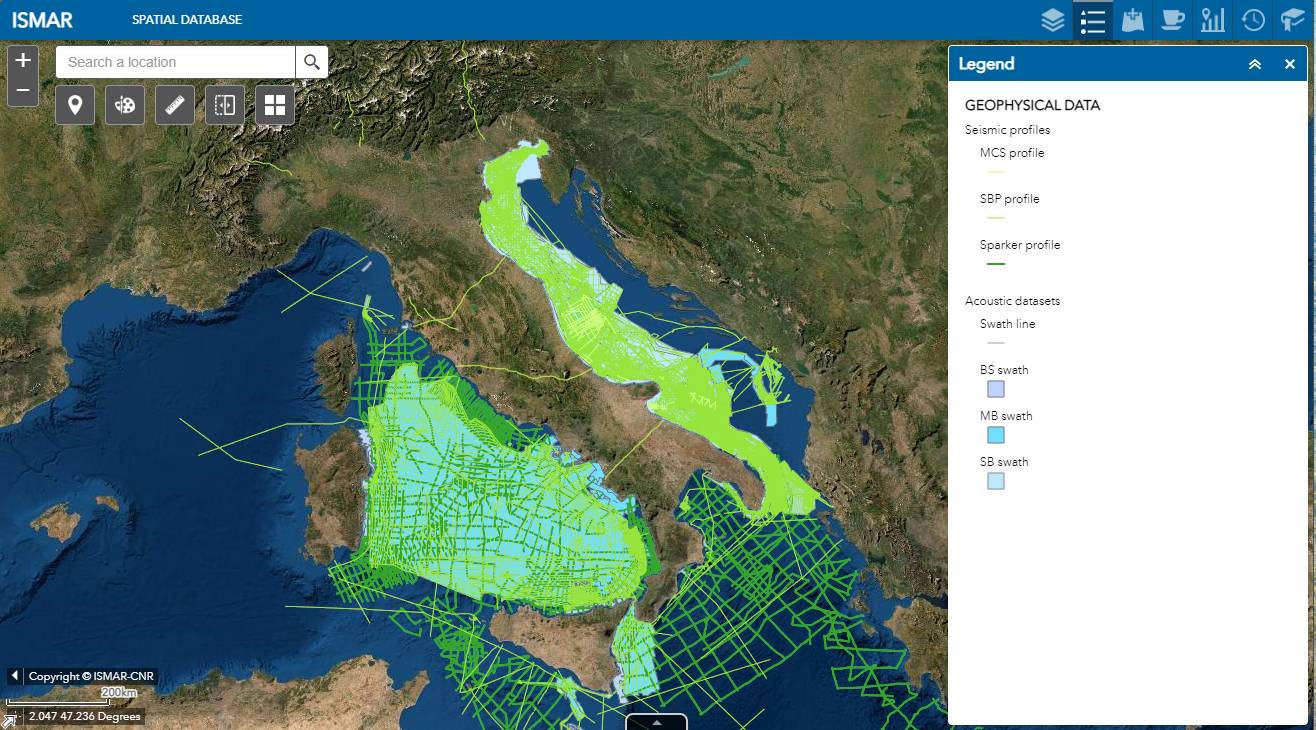
Web Map Service (WMS) providing spatial layers about geophysical data collected by ISMAR and ISP in the last decades
-

Web Map Service (WMS) providing spatial layers about the Marine Protected Area (MPA) of Torre Guaceto implemented in the framework of the AMAre Project.
-
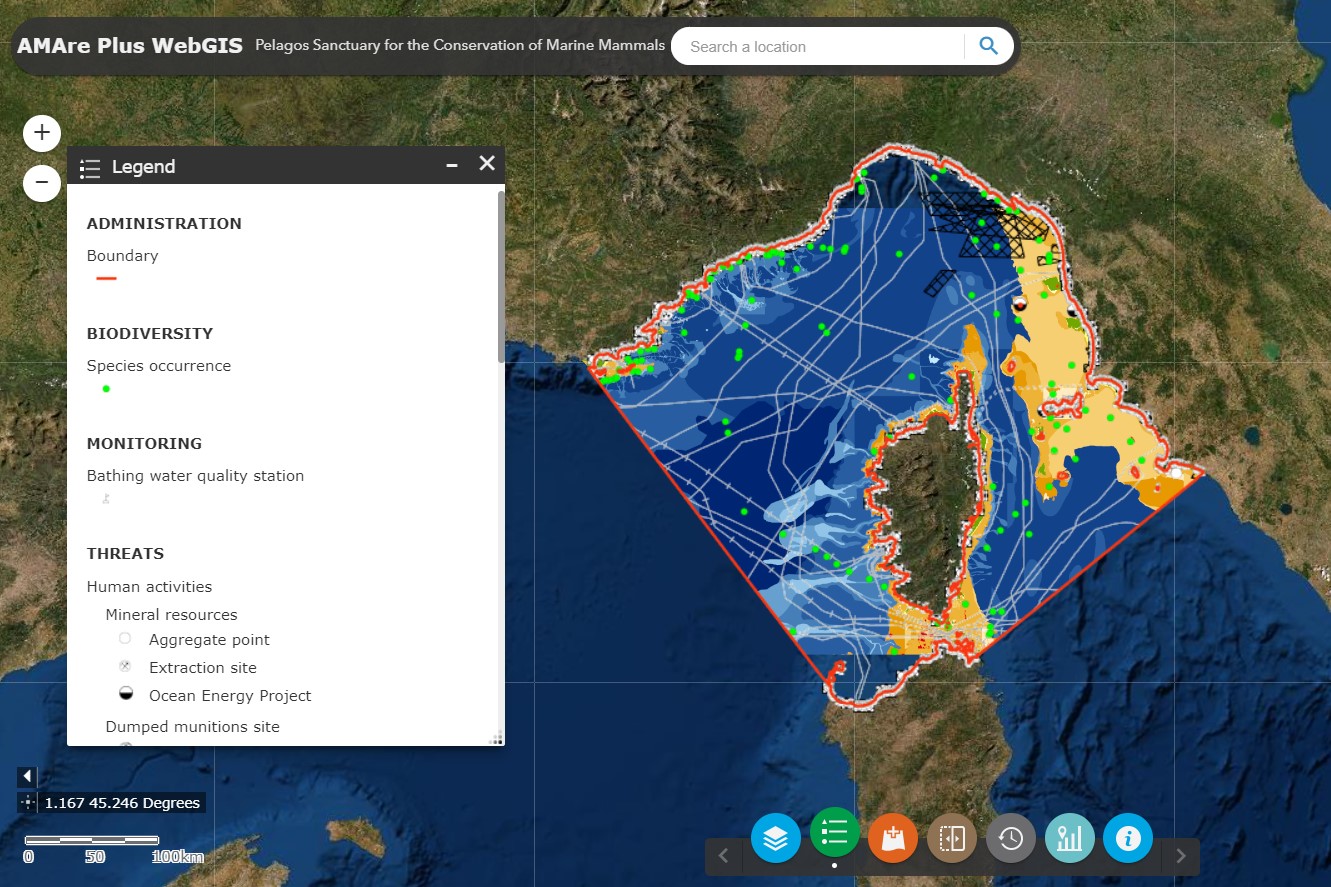
Web Map Service (WMS) providing spatial layers about the Pelagos Sanctuary for Marine Mammals implemented in the framework of the AMAre Project.
-
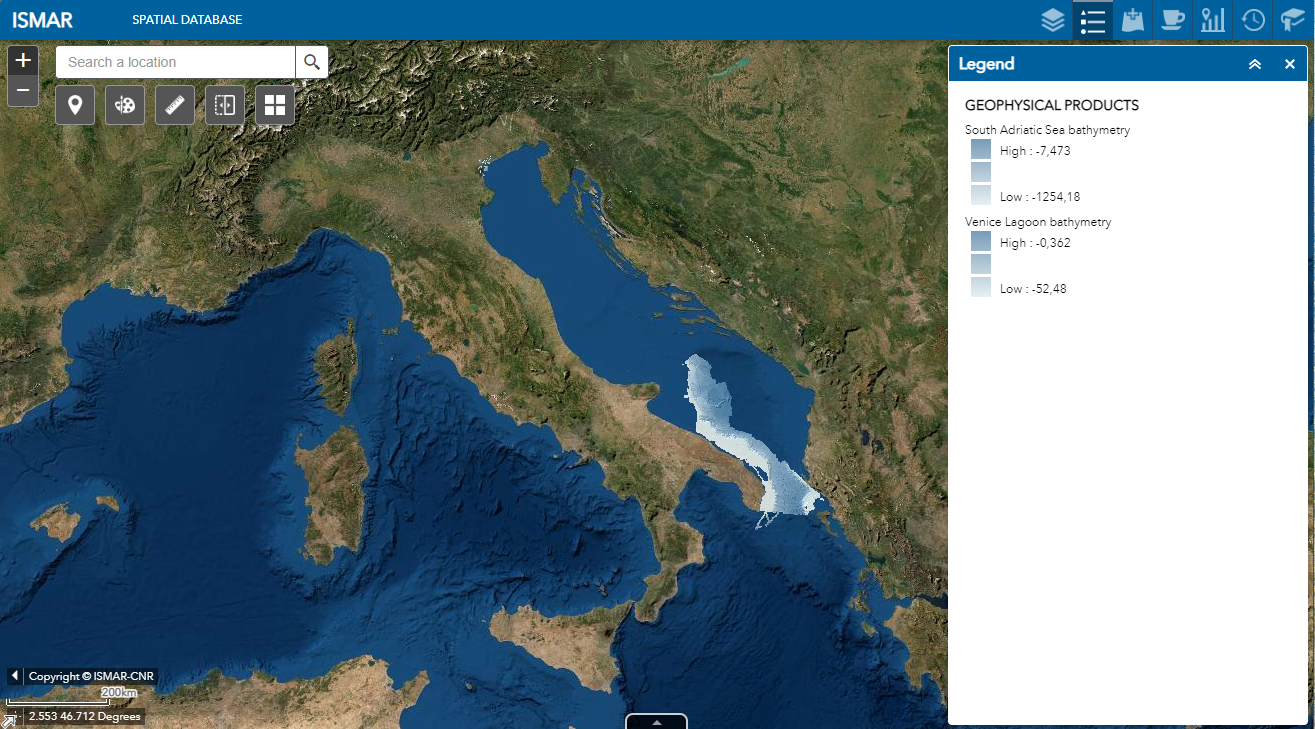
Web Map Service (WMS) providing spatial layers about geophysical products produced by ISMAR and ISP in the last decades
-
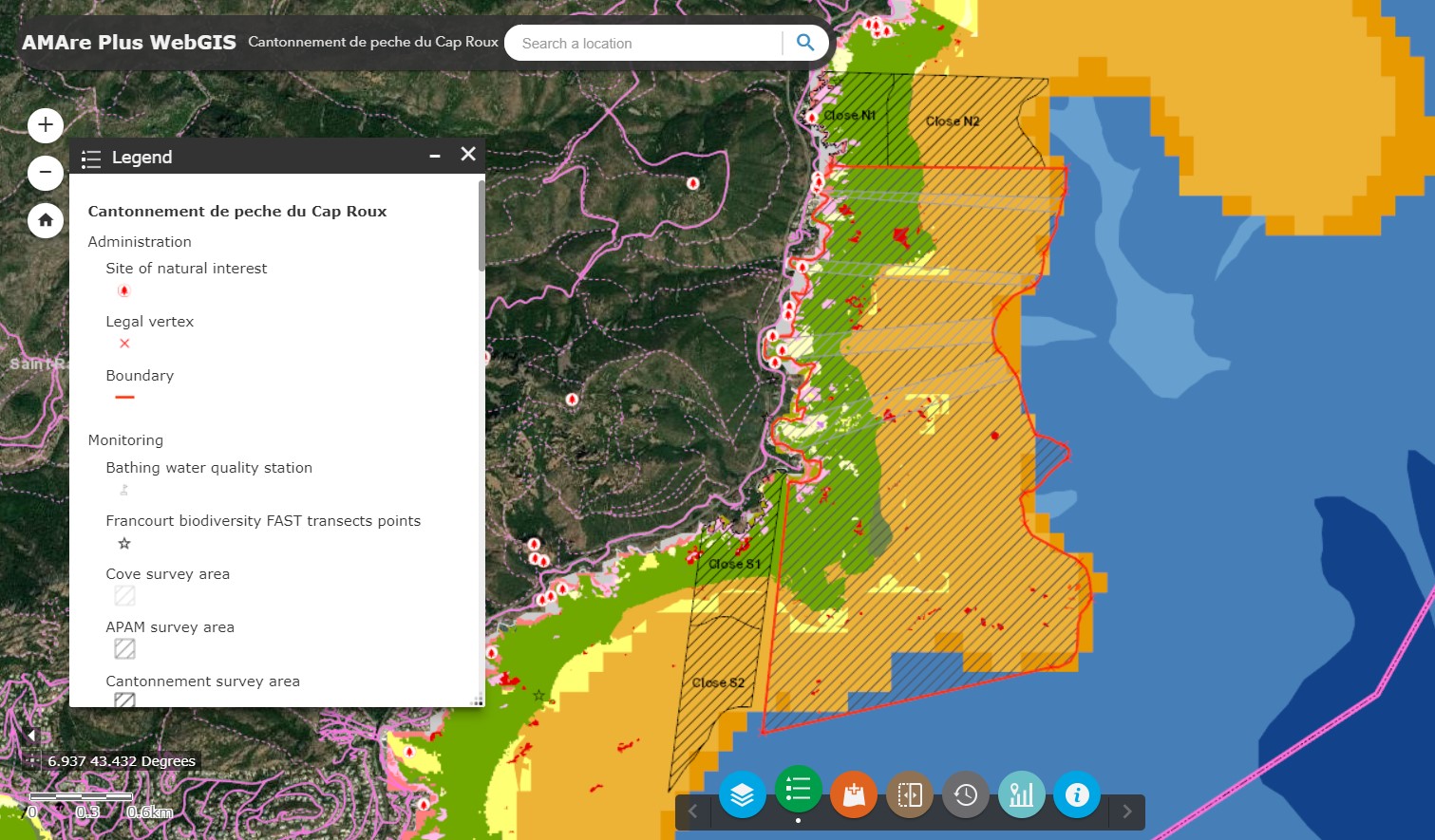
Web Map Service (WMS) providing spatial layers about the Cantonnement de pêche du Cap Roux implemented in the framework of the AMAre Project.
-
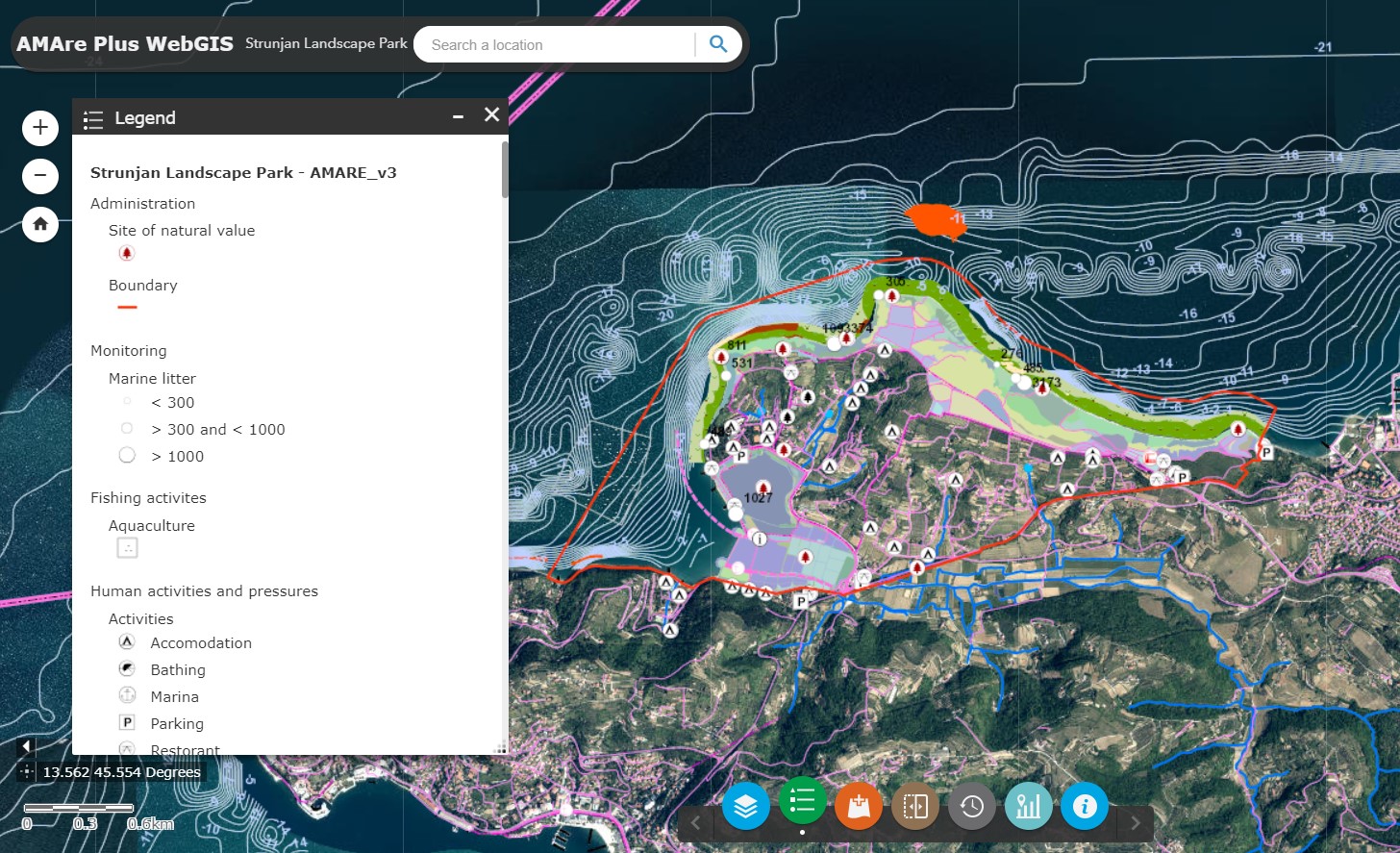
Web Map Service (WMS) providing spatial layers about the Strunjan Landscape Park implemented in the framework of the AMAre Project.
-
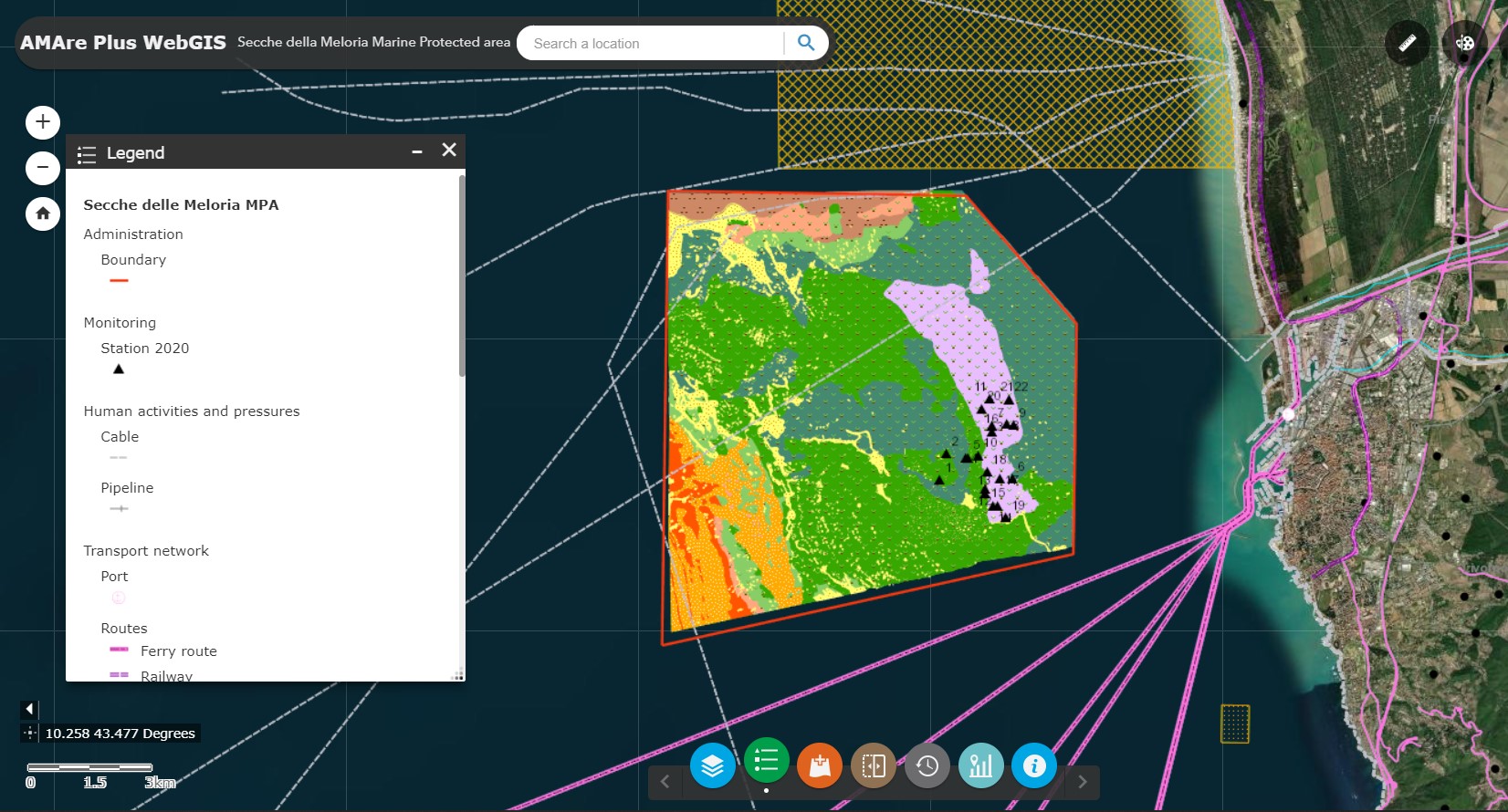
Web Map Service (WMS) providing spatial layers about the Marine Protected Area (MPA) of Secche della Meloria implemented in the framework of the AMAre Project.