 CNR-ISMAR
CNR-ISMAR
Format
AVI File
Type of resources
Topics
Provided by
Years
Formats
Update frequencies
status
From
1
-
1
/
1
-
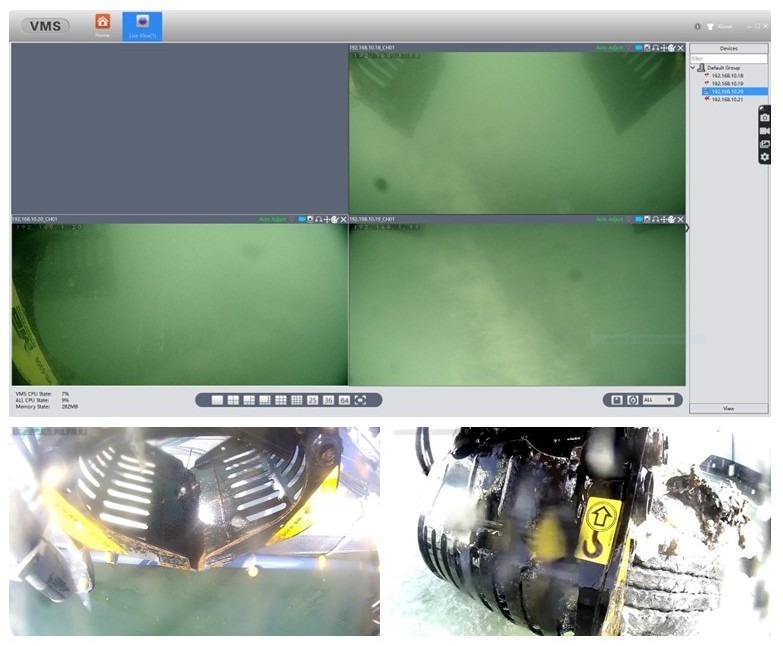
The robotic seabed cleaning platform developed by TECNALIA, CNRS- LIRMM and “Servizi Tecnici”, consists in a floating platform which, through cables and winches, the seabed cleaning robot is attached. The structure is equipped with a set of sensors for underwater perception to control the robot and detect & identify the marine litter to be removed. Moreover, the robotic platform is characterized by two different tools that allow to collect the ML on the seabed: a drudge to suck up smaller litter and a gripper to grasps larger items like tires, parts of boats, fishing nets etc.