 CNR-ISMAR
CNR-ISMAR
2023
Type of resources
Topics
INSPIRE themes
Provided by
Years
Formats
Representation types
Update frequencies
status
-
Data collected in February 2022 by CNR- ISMAR VE within the MAELSTROM project with the aim to map marine litter on the seafloor
-

Data collected in May 2022 by CNR- ISMAR VE within the MAELSTROM project with the aim to map marine litter on the seafloor
-

Data collected in November 2022 by CNR- ISMAR VE within the MAELSTROM project with the aim to map marine litter on the seafloor
-
Data collected in April 2023 by CNR- ISMAR VE within the MAELSTROM project with the aim to map marine litter on the seafloor
-
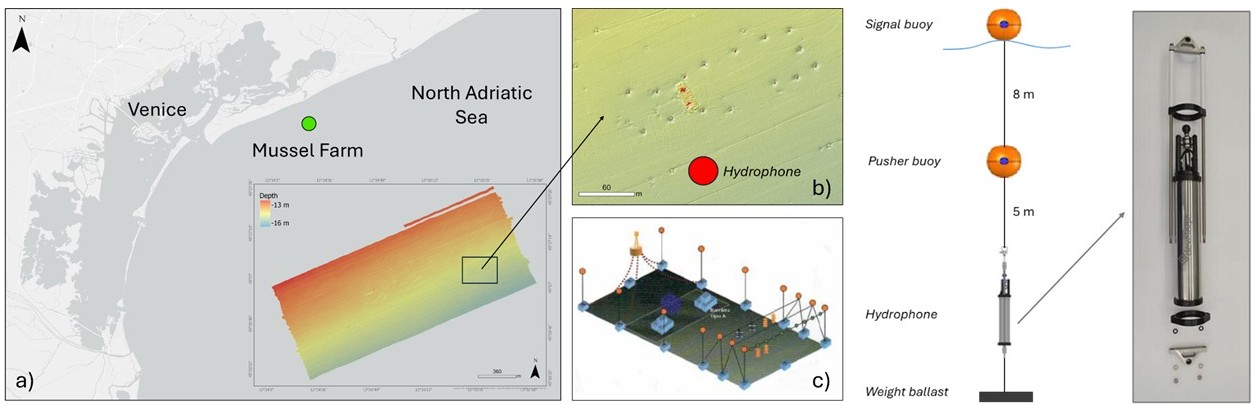
As part of the European MAELSTROM project, passive acoustic monitoring (PAM) was conducted using a hydrophone deployed before and after the cleaning campaign carried out with a robotic platform at the Mussel Farm site. The primary aim of this acoustic monitoring was to analyze underwater soundscapes to detect the presence of soniferous organisms, with particular attention to fish and potentially invertebrate components.
-

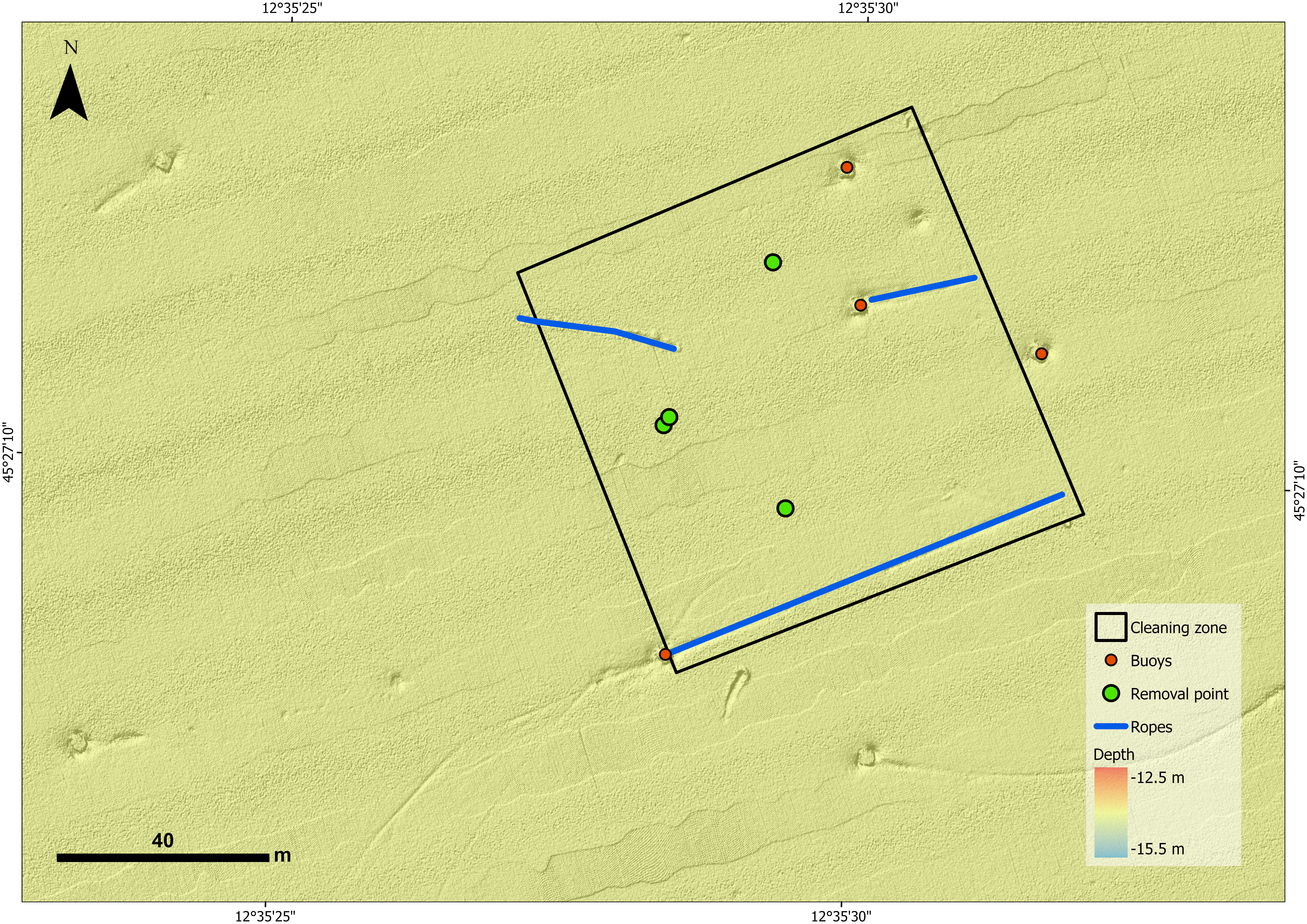
MAELSTROM (Smart Technology for Marine Litter Sustainable Removal and Management) is a Horizon 2020 (H2020) project co-funded by the European Commission, bringing together 14 partners, including research centers, recycling companies, marine scientists, and robotics experts, from eight European countries. The project seeks to reduce the environmental impact of marine litter (ML) on coastal ecosystems by identifying accumulation hotspots, intercepting floating river waste, and removing plastic-based debris from the seabed to prevent its breakdown into microplastics (MPs). At the core of MAELSTROM’s innovative solution is an advanced robotic seabed cleaning platform, developed collaboratively by TECNALIA, CNRS-LIRMM, and "Servizi Tecnici." This floating structure serves as a base station for the cleaning robot, deploying it via cables and winches while integrating a sophisticated suite of underwater sensors to detect, identify, and manage marine litter. The platform supports two key tools: a dredge for collecting smaller debris and a gripper for retrieving larger items, such as tires, boat fragments, and fishing nets. Designed to function as an adaptable and sustainable system, this platform exemplifies cutting-edge technology for marine litter removal and management.
-

MAELSTROM (Smart Technology for Marine Litter Sustainable Removal and Management) is a Horizon 2020 (H2020) project co-funded by the European Commission, bringing together 14 partners, including research centers, recycling companies, marine scientists, and robotics experts, from eight European countries. The project seeks to reduce the environmental impact of marine litter (ML) on coastal ecosystems by identifying accumulation hotspots, intercepting floating river waste, and removing plastic-based debris from the seabed to prevent its breakdown into microplastics (MPs). At the core of MAELSTROM’s innovative solution is an advanced robotic seabed cleaning platform, developed collaboratively by TECNALIA, CNRS-LIRMM, and "Servizi Tecnici." This floating structure serves as a base station for the cleaning robot, deploying it via cables and winches while integrating a sophisticated suite of underwater sensors to detect, identify, and manage marine litter. The platform supports two key tools: a dredge for collecting smaller debris and a gripper for retrieving larger items, such as tires, boat fragments, and fishing nets. Designed to function as an adaptable and sustainable system, this platform exemplifies cutting-edge technology for marine litter removal and management.
-
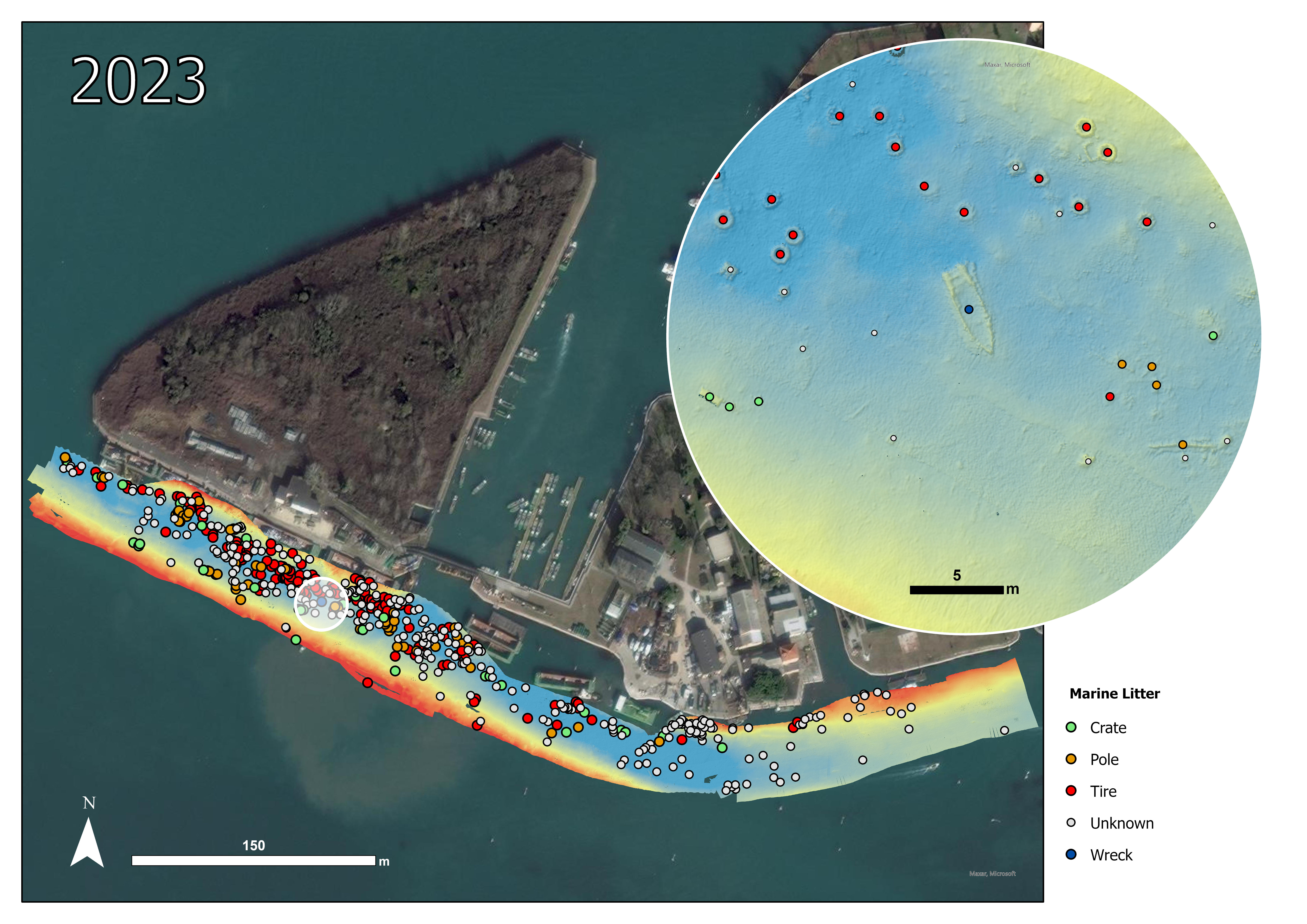
For this project, two study areas were selected and both are characterized by the presence of marine litter that has accumulated over time: a lagoon area (Sacca Fisola) and a coastal area, the latter located on an abandoned mussel farm.The lagoon site of Sacca Fisola is situated in an area where waste accumulates in substantial quantities. Consequently, the channel's seabed is marked by a significant presence of waste. Some of these waste items are buried beneath layers of sediment, while many others remain visible on the surface and can be identified using the bathymetric map generated from MultiBeam EchoSounder (MBES) data.
-
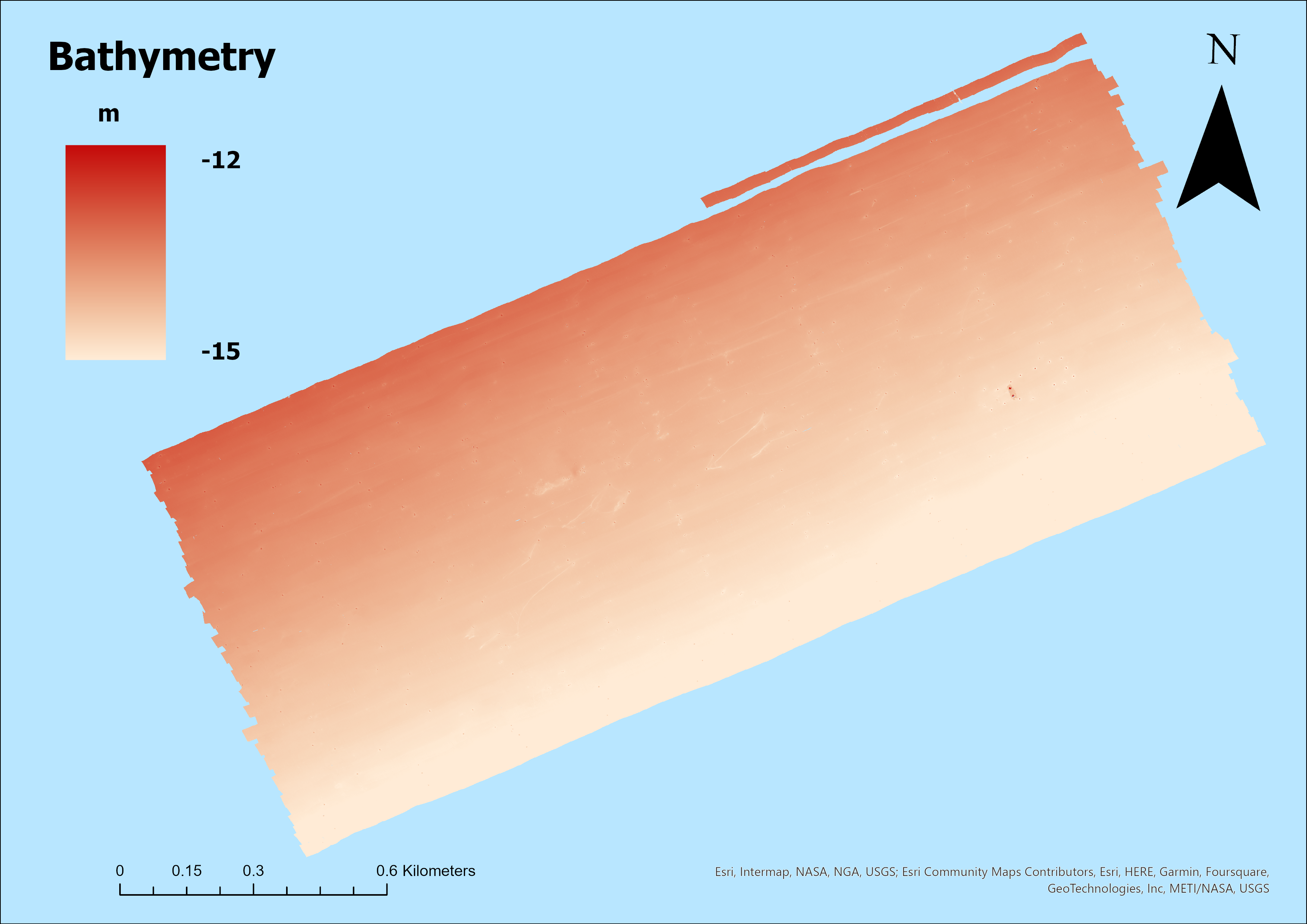
For this project, two study areas were selected and both are characterized by the presence of marine litter that has accumulated over time: a lagoon area (Sacca Fisola) and a coastal area, the latter located on an abandoned mussel farm. The abandoned mussel farm is situated across of the mouth of the river Sile, about 1.7 nautical miles from the coast. It covers a total area of 1960000 sqm with an average depth of 14 m. Mussel farm encloses a sub area called Experimental Field, used in the past for research activities. The examination of bathymetric data facilitated the acquisition of a precise estimation regarding the presence of objects suspended within the water column and resting on the seabed. This evaluation uncovered valuable insights into the underwater conditions and object types, thus enhancing our comprehension of the marine environment in the regions examined.
-
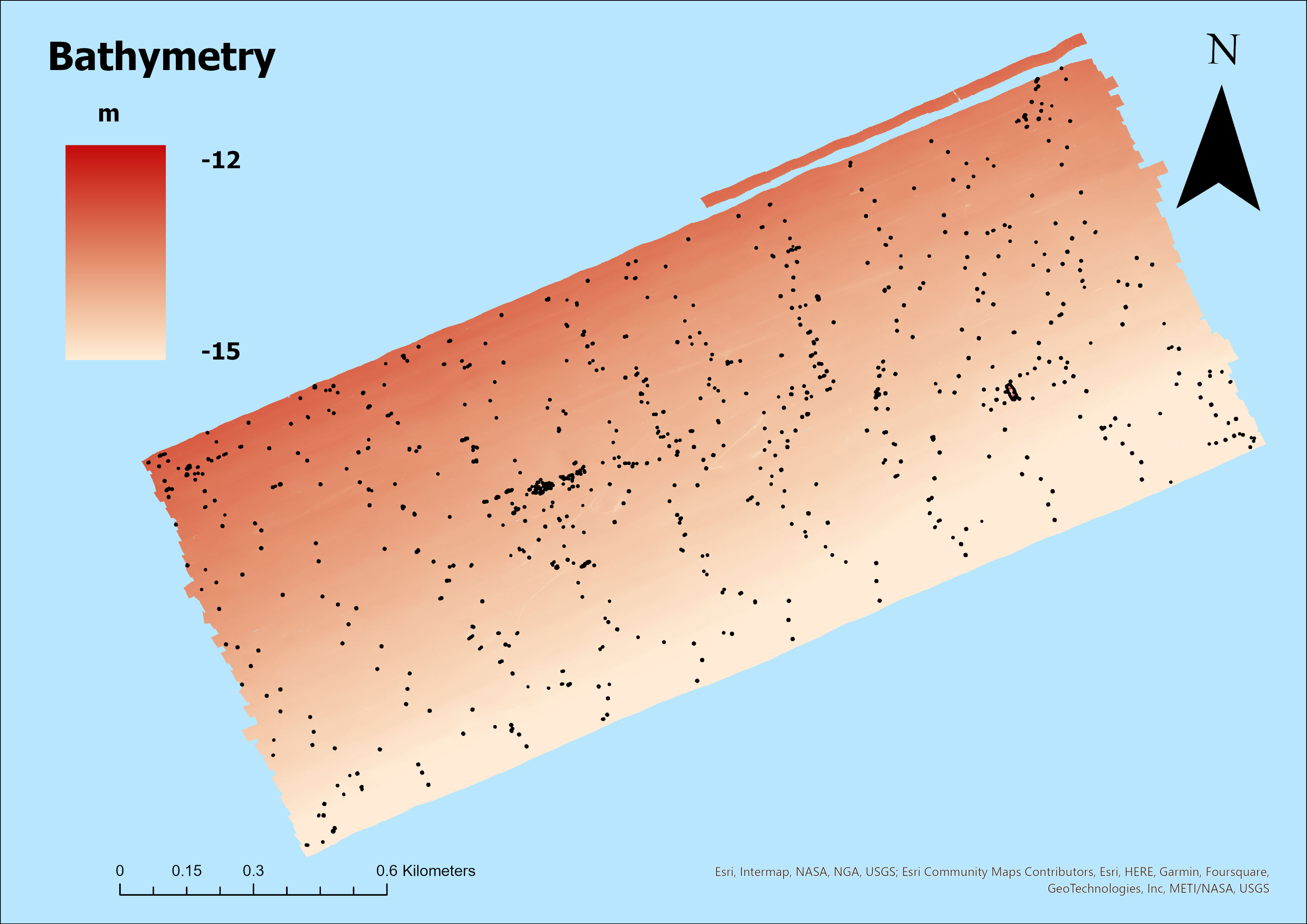
The shape files contain the marine litter targets manually identified in the Mussel Farm Area