 CNR-ISMAR
CNR-ISMAR
Type of resources
Available actions
Topics
INSPIRE themes
Provided by
Years
Formats
Representation types
Update frequencies
status
-

UNO is a underwater images dataset allowing deep-learning networks to localize non-natural objects within underwater images. The dataset consists in 279 videos, 5930 frames, and 10809 labels. UNO is a more consistent and balanced version of the TrashCan image dataset to evaluate models for detecting non-natural objects in the underwater environment. We propose a method to balance the number of annotations and images for cross-evaluation. We then compare the performance of a SOTA object detection model when using TrashCAN and UNO datasets. Additionally, we assess covariate shift by testing the model on an image dataset for real-world application. Experimental results show significantly better and more consistent performance using the UNO dataset.
-
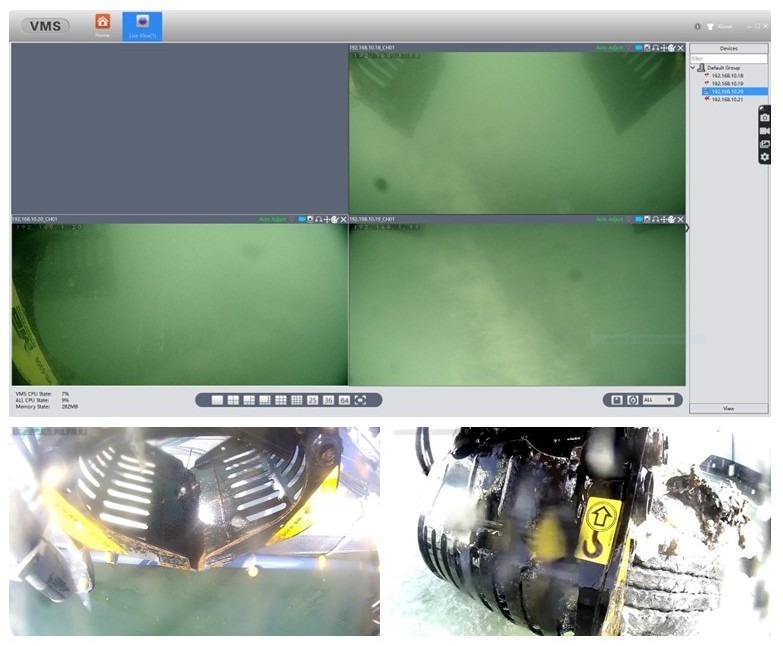
The robotic seabed cleaning platform developed by TECNALIA, CNRS- LIRMM and “Servizi Tecnici”, consists in a floating platform which, through cables and winches, the seabed cleaning robot is attached. The structure is equipped with a set of sensors for underwater perception to control the robot and detect & identify the marine litter to be removed. Moreover, the robotic platform is characterized by two different tools that allow to collect the ML on the seabed: a drudge to suck up smaller litter and a gripper to grasps larger items like tires, parts of boats, fishing nets etc.
-
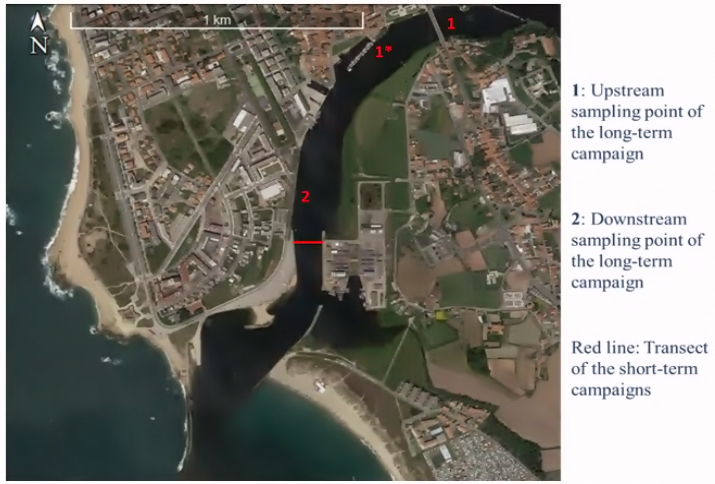
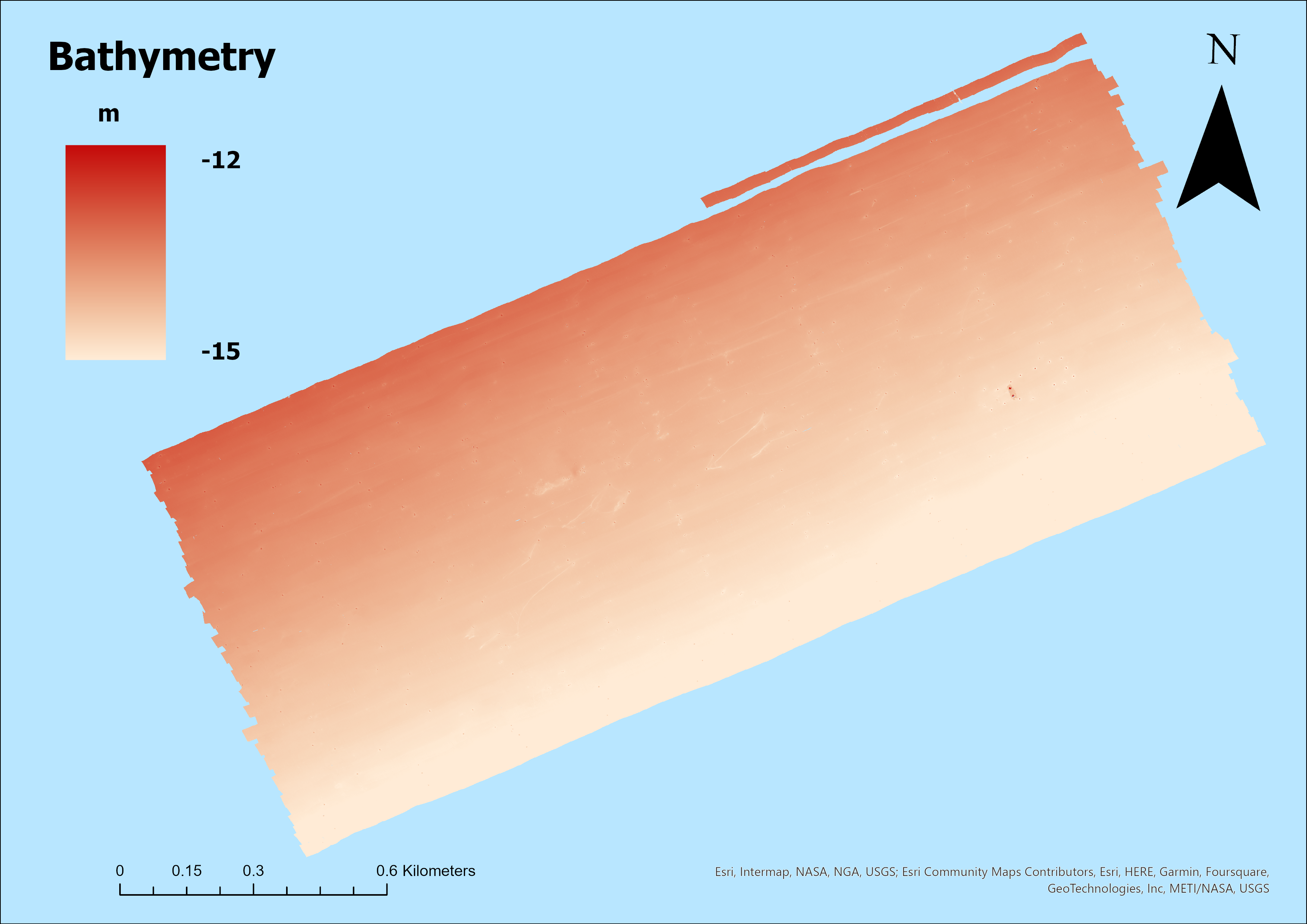
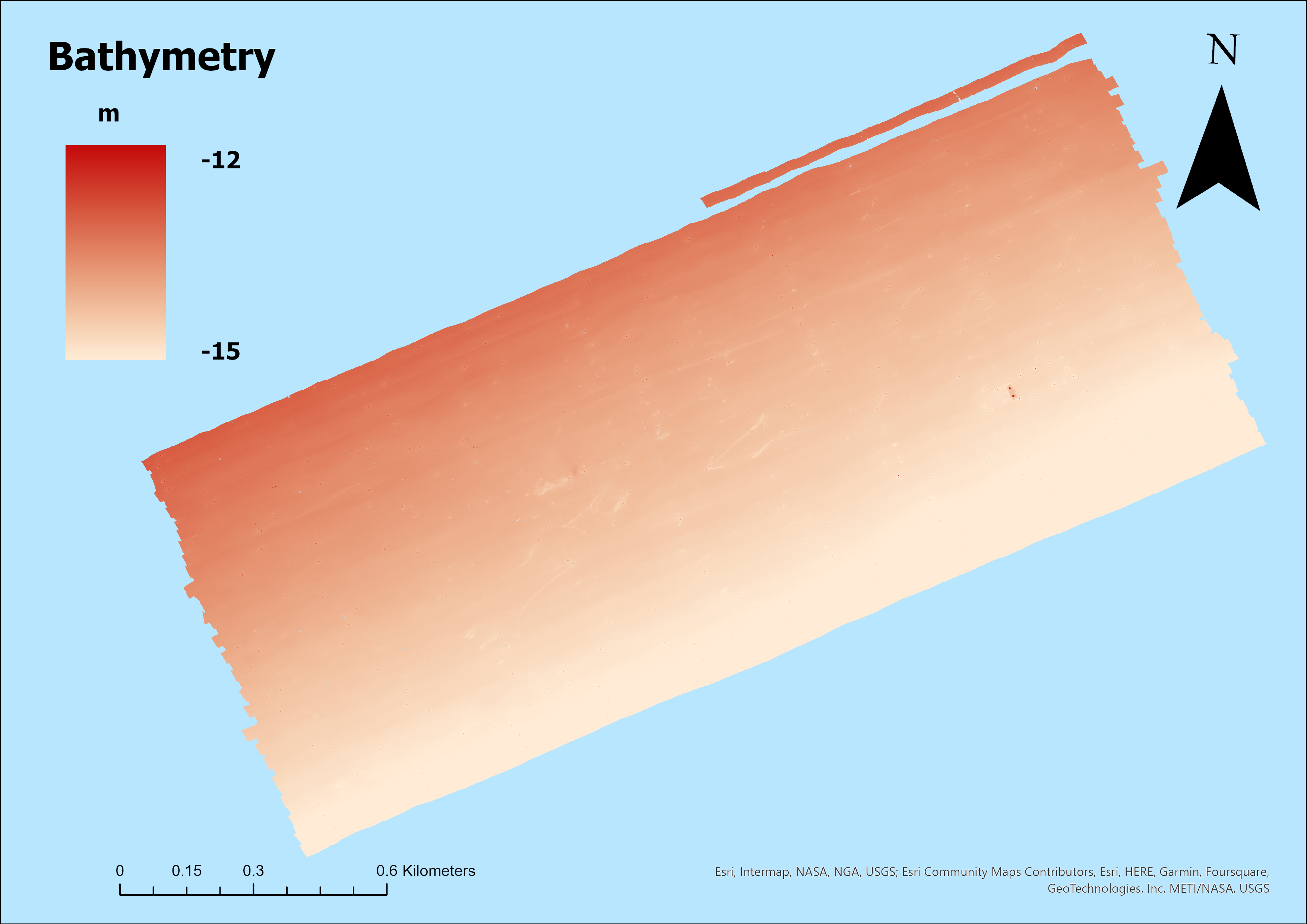
A bubble Barrier that removes litter from rivers is being applied in the Ave estuary (Portugal) in the framework of the MAELSTROM Project. In order to identify the location where the technology could possibly best be applied and to assess the impact of the litter removal on marine life, MAELSTROM makes use of numerical models. Facing the limited field data and absence of available models, we carried out field campaigns, set-up a hydrological model for the Ave river basin and set-up a hydrodynamic model for the estuarine region. The field studies included a bathymetric survey, short-term (12.5 hours) and long-term (several weeks) campaigns. Aiming to understand the temporal and spatial variation of the flow velocity in the estuary, and particularly in the area where the Bubble Barrier system is planned to be implemented, we have analysed observations from a boat sailing across the estuary (short-term), we have analysed observations at selected locations (long-term) and we have set-up a 3-dimensional (3D) hydrodynamic model to give insight in the flow velocity distribution. Only during the short-term campaigns the river discharge is known, which was relatively low during these campaigns. Since the river discharge is an important condition for the hydrodynamic model, we have only obtained maximal flow velocity maps for low river discharge. For higher river discharge we show a maximal flow velocity observed during a long-term campaign and we estimate maximal flow velocity based on an extreme river discharge.
-

Data collected in October 2021 by CNR- ISMAR VE within the MAELSTROM project with the aim to map marine litter on the seafloor
-
Data collected in February 2022 by CNR- ISMAR VE within the MAELSTROM project with the aim to map marine litter on the seafloor
-

Data collected in May 2022 by CNR- ISMAR VE within the MAELSTROM project with the aim to map marine litter on the seafloor
-
Data collected in December 2023 by CNR- ISMAR VE within the MAELSTROM project with the aim to map marine litter on the seafloor
-

Data collected in December 2023 by CNR- ISMAR VE within the MAELSTROM project with the aim to map marine litter on the seafloor
-

Data collected in May 2023 by CNR- ISMAR VE within the MAELSTROM project with the aim to map marine litter on the seafloor
-

Data collected in November 2022 by CNR- ISMAR VE within the MAELSTROM project with the aim to map marine litter on the seafloor